Today I’m writting about a nice add on for the “cheap” DJI Phantom quadrocopter, which allows for getting pretty stable Aerial footage with a GoPro 3.
I’m not going to write about the DJI Phantom in this blog, as I mainly want to keep it technical on how to configure a Tarot T-2D 2 axis brushless gimbal for Position Mode pitch control with a Naza Controller.
Be Aware!
Working on the electronics of your DJI Phantom, gimbal and every other part might leave you with a non working product.
The description bellow only describes on how I Setup These parts for my self. I will not be responsible if you mess up anyting or your Phantom falls from the sky ;0)
The T-2D also gots a Rate Mode, but this one is not as usefull to most People.
Rate Mode will not stop the pitch movement if you stop the controll unit on defined Position on your remote. So you will always have to return to the center Position of your control unit to stop it from moving. And turning it way back to get the camera back up. Stopping the movement again with Setting the controll to the Center Position. This might be usefull if you use stick, which will always return to Center Position if you release it.
But without fpv (remote camera control) you will never know what angle the camera is set to.
So this is why I prefer the Position Mode.
If i turn the button on the remote (channel 7) to a specifi Position the camera will always rest at the same angle.
This allows me to better control camera movement.
So how to configure the T-2D pitch control to get it work in Position control?
It’s not that hard at all!
You will need to get 3 wired Connections. You can use standard servo cables, or you can crimp your own ones.
This is for Firmware 1.1 and 1.2. It seems you can skip the cable C to F1 if you are using firmware 1.3 or greater.
I’m running 1.4 the way as described bellow without any problems. But I was just to lazy to remove that cable yet.
Jeremy Nichols was stuck in rate mode by using 3 wires and a firmware higher then 1.3.
So if you use one of the latest firmware releases then skip the C to F1 cable mentioned bellow.
If your gimbal is doing strange movement after upgrading to 1.4 you might need to recalibrate it.
Follow the steps in the manual or just watch the following Youtube clip 😉
https://www.youtube.com/watch?v=e0PU0osCE4o
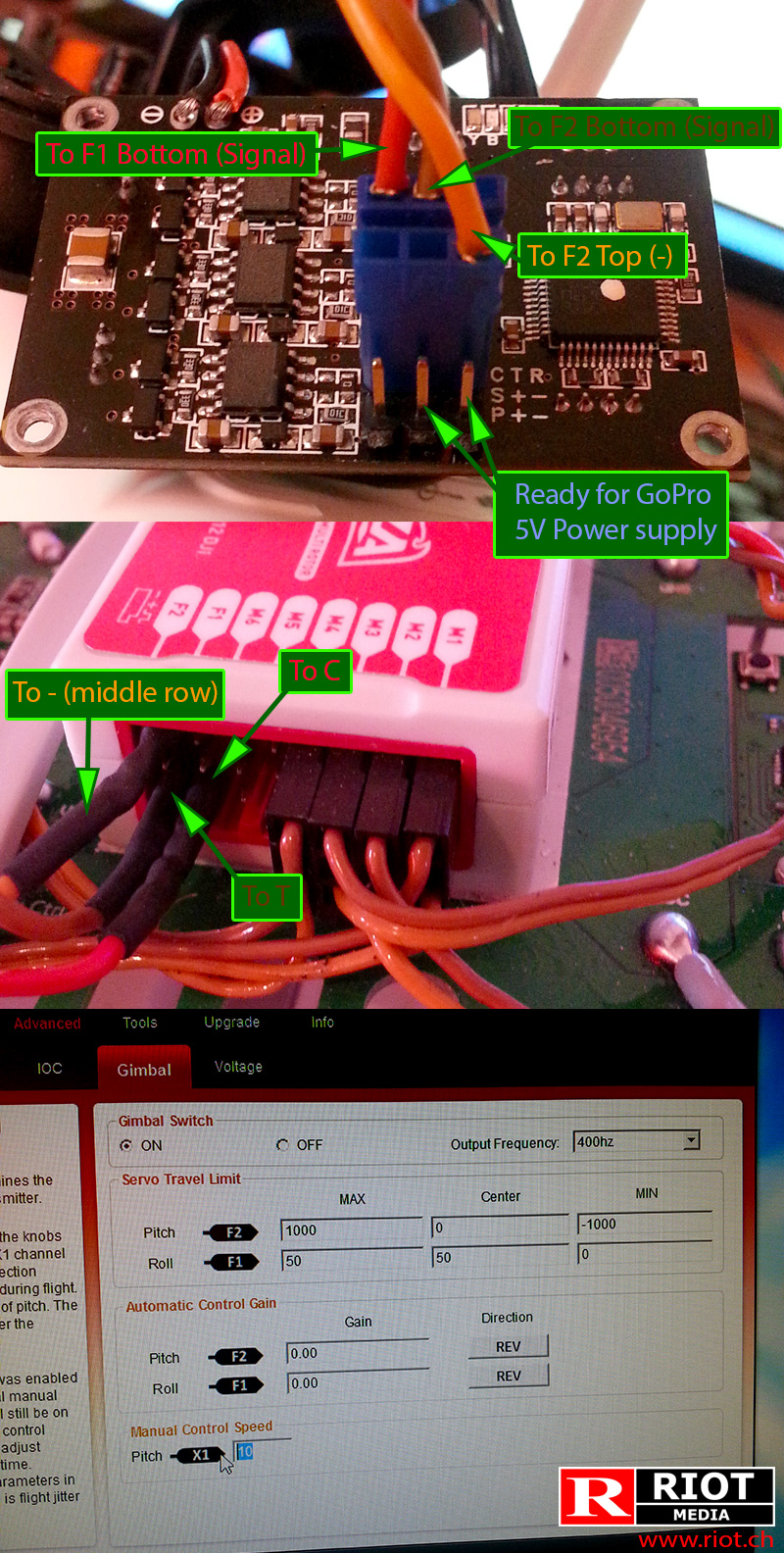
- C will need to go to F1 bottom (signal) (you can skip this cable if you just want Rate Mode or using a Tarot T-2D firmware higher then 1.3
- T will need to go to F2 bottom (signal)
- (-) will Need to go to a – (use the one in the Center row so you can use the other one to power your GoPro straight from the T-2D gimbal board)
Now you will also need to change some Settings in the Naza control Software. These Settings might need to be slightly different on your Setup, depending on how you set the Parameters in the ZYX-BMGC-EN V1.0.exe Software, which you will need to Change Parameters on the gimbal board.
I set the gimbal for a max of 90 degrees movement. So it will never turn up to the Rotors or backwards.
My Naza Settings are:
Servo Travel Limit
Pitch F2 Max 1000, Center 0, Min -1000
Roll F1, Max 50, Center 50, Min 0
Automatic Control Gain
Pitch F2, 0.00
Roll F1, 0.00
Manual Control Speed
Pitch X1, 10
When everything is setup like this, the gimbal should behave like in the Video bellow.
Tarot T-2D Pitch control in Position Mode using a Naza controler on a DJI Phantom from Riot Media on Vimeo.
So this is it.
Not much Magic at all.
Oh, and one more tip ^^
If you fix your Tarot T-2D Gimbal straight to the DJI Phantom housing, then the gimbal will hang slightly to low.
Instead of buying some different landing gears i just placed some cheap 5mm plastic nuts between the landing gear and the housing. If doing so you will also need some longer screws to screw the landing gear back on. M3, 10mm worked great for me.

A couple of days ago I shot a little test clip to see how the Tarot T-2D gimbal performs.
Please click like on Youtube if you enjoyed it ;o)
Zug – A aerial view on the medieval part of the beautiful Swiss town from Riot Media on Vimeo.

 Diese Website benutzt Cookies. Wenn du die Website weiter nutzt, gehen wir von deinem Einverständnis aus.
Diese Website benutzt Cookies. Wenn du die Website weiter nutzt, gehen wir von deinem Einverständnis aus.  This website uses cookies. If you continue to use the website, we will assume your consent.
This website uses cookies. If you continue to use the website, we will assume your consent.
where do you get the software for the gimbal?
Check the manual. I think there was an url. Or do a Google search. I’m on vacation and only got very limited internet access. Hope this helps.
the new version of the software, v1.3 let you change to stick mod within software
Does the entire sweep range of the knob work? I made this mod and have it set to 0-90 deg like you, but the first 1/4 turn of the knob does nothing…. it has a deadzone.
In my case I’m just about using a 1/4 turn of the knob. As I’m only using 90 degrees this matches perfectly in my case
Mathias: Do all three wires still need to be hooked up if the firmware if up to 1.3 on the gimbal? I’ve read mixed things on this given that there is a stick mode option in the 1.3fw upgrade.
Thank you.
Hello Steph
I’m currently on vacation. So I’m not up to date with the latest facts. I haven’t upgraded the Firmware to 1.3 yet, as I didn’t want to risk anything prior my vacation where I used the Tarot for filming. Never Change a running System 😉
I’ll look into it when I got time. But will be off for work across Europe till the end of September. So sorry if I can’t give you an anser in the next few days.
Hello Mathias,
First of all, enjoy your vacations 😉 …then big thanks for this tutorial and the time you needed to make it.I’m 100% newbie and just get my Phantom 1 month ago…i would like to buy a Tarot T-2D TL68A00 like you, but i’m afraid that i won’t be able to install it an program it ): I’ve searched around during many hours i found no tutorial about that.What i mean is a tutorial from scratch to install it on the Phantom…May i ask you, if you know one ? or if you planned to make your own when you will be back ? Thank you so so much…Fabien from France
So you were able to power the gopro directly using the bottom two right pins?
Hello Fabien
The Tarrot T-2D gimbal comes about 80% preassembled. You just need to build a few parts together. If you ever build a Ikea furniture, then this will be an easy task for you ^^
Just take a look at the plan, think about it for a Minute or two and you should be fine. I first made the mistake by thinking the design is like others where the gimbal hangs on the bumpers. But actually ist much smarter, using the bumpers with pressure from the top plate above.
If you want to mount the gimbal directly on the Phantom, then you’ll need to drill 4 holes in the body. Take your time and double check what you are doing, so you are not drilling any electronice inside 😉 Thightning the screws with this method is also a bit tricky, but doable. If you want a easy way to mount and dismount the gimbal, then just buy one of the many available adapterplates in the Internet. This way you can mount it to the two stock fixture Points. If you use a adapterplate the overall build height is taller, so you will need to raise the legs a bit further, compared with the fix to Body solution. Hope this helps.
Hello Ian B
Yes, you can power a GoPro from the mentioned ports. But there’s a slight problem with the GoPro Hero3 Black yet. If you use a Black, you will need to leave the battery in the GoPro or the cam will not power up. Once it is on, it will pull the power from the supplied powerchain of the gimbal.
You can pull out the battery of a GoPro Hero3 White or Silver. These cams will boot up with just an external power source. So this way you can save weight on the camera.
Maybe GoPro will fix the behavior of the Black in a future firmware update. But we will need to wait and see what the future brings.
Mathias,
Thank you so so much for your time and your great explanation.I read inside your mind where you wasn’t here…i bought a plate from ebay to install the gimbal more easily.
BTW…i was more afraid about the connection to my FUtaba t8j…some people are connecting it through the RX and others to the Naza…i am lost…all i would like to do is the best smooth gimbal that it is possible…this is why i though it was a good idea to connect the “R” roll…that some people use from their stick…but once again, is it connected to the Naza or to the RX to do that ??? arggg
Hi,
Im thinking of getting one myself, one question: where did you order it? I live in switzerland too 🙂
Thanks!
I’ve orderd it directly from Tarot.
http://www.tarot-rc.com/index.php?main_page=product_info&products_id=1029
Also get the GoPro Video out cable if you want to powersupply a GoPro or do some fpv.
http://www.tarot-rc.com/index.php?main_page=product_info&cPath=65_96&products_id=1028
I don’t have any experience with the Futaba t8j Receiver. Sorry.
I still use the stock tx.
Thanks!
Mathias,
Thank you very much for your fantastic blog! I strictly followed your instructions and it worked out of the box! There was no need to touch the Tarot software. All settings can be adjusted in the Nazam software and it works 😉
Cheers
Fred
So i just assembled my Tarot and powered it up with the battery connected to my Phantom. I don’t have any other connections made to anything else, and when it powers up a yellow solid line comes up, but the gimbal itself stays off. Do i need to do a firmware update or plug any cables to the Naza?
Sounds like you connected the motors wrong. Look at the build diagram you received with the gimbal and check.
Sorry I can’t supply a pic as I’m shooting in the middle of nowhere in France right now.
Hope you get it fixed.
I have updated to the latest firmware and am only using 2 wires from gimbal to naza (I read this some where) but my gimbal won’t tilt down past -78 ish degrees…help!? 🙁
Hi,
I have managed to get my pitch working for the dji phantom using the tarot gimbal. However recently it stopped working. If I connect a 3S supply to the gimbal no lights turn on at all. If I connect BOTH the 3S power supply to the gimbal and also connect the pins on the gimbal control board to the naza in the Phantom and power on the phantom, only then does the lights on the gimbal turn on.
I do get the initilization light and then get a blinking blue light with a solid green light. Is there anything that I can do to fix this problem because the gimbal isn’t moving.
I have looked at the manual and it says a solid green light is over current problem but I am still using the exact same setup and 3S supply as before. Its says after troubleshooting, reapply power can recover. Does anyone know what the troublshooting procedure is?
I will really really appreciate a reply.
Reagrds,
Bill
Hi can someone tell me where to buy the “plate” to use with Tarot gimbal on DJI Phantom… any help from you all is most appreciated.
Great resource, Mathias!
Can you talk briefly about how to supply power to the Tarot from the Phantom? Are you powering from a separate battery or drawing from the Phantom?
From a weight/flight time perspective, is one option better than the other? I
Hi, thanks for for your help here. If possible, can you post a Pic of your Settings of the Tarot Gimbal Control? My Gimbal was working fine out of the box, but since i have it mounted and wired on my DJI Phantom it holds position for a few seconds, but then tilts out all the time when moving the Phantom just a little, not even speaking of flying it. I played around with settings in both, Naza & Gimbal, but the behavior does not disappear. Can it be a bad wiring or soldering? I am using the Batteries Balance plug to power the Gimbal, might this have been a bad idea? If you have any tip or idea would be sooo appreciated!
Thanks i advance.
Andy
I’m still filming on a road trip. So I won’t be able to supply a pic soon.
Actually I use the stock settings. They worked great for me. The only thing, if i remeber right, was setting the max allowed angle. So I set it to be 90 degrees. This way I can turn it from horizontal to straight down.
I did not update the firmware yet!
I’ve heard you are now able to controll the gimbal with one cable less. But I really will need to look into that first.
I get my power from the spare power cable, which you’ll find in the leg of the Phantom.
Are you sure all the wiring is setup correctly? I’ve come across quiet a few users which did not plugin the motors correctly to the board.
Hello Ken
My fpv sender, the gimbal and the GoPro get their power from the spare powercable which you’ll find in the Phantom’s leg.
I use the balance port for a volt warner as a added security part.
My flight time is still about 6+ minutes. But I’ll always take it down at about 5 for security.
Adding a additional battery would probably take flight time further time. But I have never checked.
I’ve seen quiet a few pics of people using two LiPo’s to power the Phantom and get pretty good flight times with it.
I’ll might try that sometime. But I’m pretty sure the behaviour of the Phantom won’t be as good anymore. I also doubt the motors like the weight of a additional battery.
Thank you! couldn’t have done it without your great info.Dennis
I fixed mine and it was that the motors where wired backwards…. also So my Tarot came without the red/white cable to control the pitch… i been trying to find where to buy it but no luck yet…. any suggestions…
Hi there, my tarot didn’t came with the cables for pitch control, any idea where could i get some? thanks.
These cables are not part if the delivery.
Just get some servo cables or crimp some cables self like i did.
Hi guys!
There is anyone having problems with the gimbal loosing the roll level?!
With me it happens all the time… and happens even with the multirotor off, just gimbal powered if I rotate the multirotor the roll level goes off to the left or right.
Great post by the way!
Can you hook the Gopro AV cable for Tarot 2D gimbal to the Tarot 2D board power supply to charge the Gopro Hero 3. As indicted in picture above. P + – “Ready for GoPro 5 volt power supply.
Thats how I do it. I’ve heard from people that burned their gopro. But i’m pretty sure they connected it wrong or used a to strong powersupply. Saddly the black needs a internal battery too boot up.
But at least you won’t need to change gopro batteries.
its great its work ! thanks !
http://youtu.be/AmfqesqDUZk
Hi
I am waiting for the Tarot to arrive and getting ready to mount it
May you please tell me if you got the upgrade board to get pitch control and if your firmware is still 3.16?
Thanks a lot for the video
I had a problem with my gimbal but donno whether its normal and need your help pls. I follow through all your setup and settings. ( Tarot gimbal setting was load as default ) When it roll to the right end ( gopro facing myself ) it powered off but i can see the pcb blue led still blinking. Left dont have any issue.
What happened ? pls help
I hope it will work for me to.
But how is the conection in the radio whid the potentiometer??
Hi and thanx for sharing yout settings.
Could you please share your settings in the Gimbal Calibration tool (Tarot-Software) as well. I have some difficulties with vibrations of the gimbal motors wich are too strong not to be seen on video. I realized that different gains have an effect on those vibrations. What are the best settings using the Tarot Software.
Thx so much
Christian
I’m using the default settings.
No upgrade board is needed. I used the Tarot with 3.16, 3.18 and now 4.00 Naza Firmware
I don’t know. But maybe check if the screw that fixes the cam carrier is thigh. Also make sure the cables are routet to allow free movement.
Yes
Thank you for your answer. Since I bought a used one I do not know the default settings. And when I got the gimbal it was shaking and vibrating. I did some calibrating wich lead to a good result. Can you tell me the default numbers for all 4 tilt gains, all 4 roll gains, and the motor power settings. If not – no problem, I was just curious, because I heard that the gimbal works best right out of the box …
Awesome. Just what I was looking for. Thanks a lot. One question. Im a noobie at this and what do you need for your connection on your Tx?
Are you talking about the chanel 7 knob? This needs to be a linear potentiometer. Some people use a 5kOhm and I also heard of people using 100kOhm versions. Most important fact is that it needs to be linear. And don’t buy the cheapest one 😉
I do not have the default paramaters here right now. I also needed a Win7 pc to acces the config menu, as there are still some troubles with win8 drivers. So I would need to get a win7 pc first. But I’m pretty sure you’ll find the parameters somewhere. Or maybe there’s a button to load the default parameters? Hard to tell without current access. Sorry. But take a look at the download from Tarot. I think there is a file with the default parameters included. So you just would need to load that one to get to a starting level. http://www.kingwjg.com/ZYX/Gopro.rar
Sweet. Thanks. So a linear potentiometer. Cool. ill give it a stab. Like I said im a newbie so not sure how to do it but this helps. Is there anything else I need to connect to it or buy?
where do you connect it to the Tx?
Cooler Clip! Von welcher Band ist denn die Musik? Shazam erkennt den Song leider nicht …
Thanks for the useful info
Do you not need to connect the ‘Roll’ pin to anything on the gimbal?
Cheers
HI Mathias
Yes I mean chanel 7
Do you have some picture or something at how I connect the potetiometr i dji radio.
HI Mathias
Kan du svenska???
No, sorry
I would Need to take a pic, but there are plenty in the Internet.
You can also take a look at this Clip http://www.youtube.com/watch?v=r9DFf2ZY8S0
Only if you got a remote that supports also roll 😉
Thank you so much Mathias I will lock at that video and mountit in my radio I hope it works
Thank you
Ove
Hab die Musik bei Audiojungle gekauft. Hier ist der Link http://audiojungle.net/item/straight-to-the-top-hey-hey-hey/122268
Whenever I turn on gimbal in the naza software, the gimbal does not maintain pitch control. Manual pitch control works to set the pitch, but when I start moving my my DJI Pantom, it does not maintain the initial position. It works perfectly when gimbal is turned on naza software. Any ideas on what’s going on? Thanks.
I’m nbot sure if I really understand what you are talking about. Are you saying the gimbal keeps turning even you stop turning the potentiometer? If so, you are using Rate Mode and not Position Mode.
No. When I stop turning the pot, the gimbal stops. I just identified & fixed the problem. I had the gain set too high in the naza software. After adjusting it to zero (0) as shown above, everything works fine now. Thanks!
Hi!
Got my Tarot BL Gimbal today.
I´ve searched for some good manual since 2 weeks an finally I found it on your website.
Nowhere I was able to find out how I have to plug the Naza to the board so I am able to use the mounted shift-lever on mx Phantom-TX.
On your website I did.
…and all the tricks too (cheap spacer, postionmode,..)
Thank you very much for this blog!
All the Best from Austria
Hannes
Hi, i have roll drift issue…i connect everything good and its work good , but if when i use yaw (in flight and at home) the roll drift on the left and on the right…i put i little level downside of gopro…and for lelelling correct the gimbal i make some yaw rotation to level the gimbal correctly. for this reason i connet the naza roll output on gimbal ,but nothing happen…my mind think that this connection override the gyro of tarot…can you have the solution for this issue? ps the tarot have the factor pid and the wires not does friction.bye
Tarot gimbal was perfect your settings default. did naza settings for position mode 5k pot 1/4 turn to rt face down.worked perfect until put in new naza v2 software/firmware 4.0/2.18 Now turn pot. gimbal goes in out of control . Rt on pot nothing. left on pot goes back to looking behind copter! Thanks it was perfect before new software. Have a good day.Dennis Thanks
RE-set your parameters for naza /nothing on tarot left alone thanks.Couldnt of did position wires w/o ur photos
After updating to 4.00 you need to load the default parameters from the dji website and change the parameters afterwards again.
You also must recalibrate all sticks, switches and the potentiometer.
Thanks for ur fast response! Fixed tilt by calibrating x1 potentiometer, missed that.Works great thanks! Dennis
Hi
Can you explain how you connect the kob inside the transmitter?
Tommy
Read trough the answers. Its in there 😉
Thank you so much!!!! I am sending you some Karma today.
Thank you four tue tutorial, perfekt work.
My Problem is, that i can not make a Connection anymore from the tarrot gimbal to the Computer.
The gimbal works fine, but in rate-Mode..
Now my question: can i change the mode via the naza? The cable from F1 to C should be good for something, i think?
Thank you ans greez
Dieter
Hallo again
The Problem is solved. The Setup in The naza-software was not writen to The Phantom. I made a new Setup, now the gimbal works korrectli.
Hi there,
I have my angle limits set to 0 and -90 and I can use a switch on my futaba to flick between the 2 positions and it works fine, but I want to change it to -20 and -90 so the camera goes between tilted down slightly and straight down. However it doesn’t seem like the ZYX-BMGC-EN software will let me enter a negative value for the maximum angle limit, if I try to set the angle to negative it just resets to zero. Have you tried this? Any solutions?
I just got my gimbal Today . I wanted too say thanks in advance . Do I need to have the gopro to build it . And should I upgrade my phantom first ?
You can build it without the GoPro. But you won’t be able to test it due of the missing mass. So i’d waiz till you got the real setup.
Upgrading the Firmware to 4.02 is a good thing. At least in my eyes. Be sure you check out on how to correctly upgrade the firmware prior just starting the newest Naza assistent 😉
[…] een gek probleem. Ik heb de phantom en wil gebruik maken van de tilt functie voor de tarot. Ik heb deze instructies opgevolgd maar het werkt niet. Ook in de naza software gebeurd er niks op de x1 Wat zie […]
Sorry, my dutch isn’t really good. So it be good to ask in english language 😉
just received my Tarot 2D gimbal for my DJI Phantom today. I followed the instructions on both the pamphlet that was included and reviewed instructions by other people on youtube. When I connect the power both the green and yellow light come on. The green flashes 3 times and stops. The yellow stays solid and nothing happens. What am I doing wrong? I’ve tried switching the cables around and the results remain the same. Any additional assistance would be greatly appreciated.
Are you sure you connected the motors in the correct board plugs? This seems to be a major mistake for most tarot problems.
Hi!
I want to extend my landing gear as yours, but i wonder whats size of the screw and what length is recomended?
I have nothing to measure it with, so i was hoping you could tell me, so that i can order from ebay.
thanks
I used M3x10 and M4 polyamid hex nuts if I rember right. But it might be wise to extend the legs a bit further. So M3x15 and double use of hex nuts could be even better.
when i power my gopro direct from the tarot board, the chips get hot and it seems it won’t boot so quick (sometimes not at all) as without powering the gopro. Does anybody experience the same? Is there a signal where i can get 5v from within the phantom?
Also: my x1 channel did not work out of the box, i had to update the firmware of the remote (good thread here: http://www.djiguys.com/Forum/viewtopic.php?f=4&t=2128&hilit=x1+phantom+remote)
And just to let you know: the newest tarot ships with a new plastic mount that puts the buffer rubbers aside the battery cage, so you don;t have to extend your landing gear as much
Mathias, you are doing us all a huge favor and service taking so much of your time to answer and problem solve
My Tarot works fine for gimbal services out the box and I’ve gotten some very fun video but, I have been struggling with getting pitch control to work.
Thanks to your blog here I may have the solution.
Keep you posted
Hi,
Anyone that might have a solution to my problem?
I am running V1.4 software and have selected Position mode, hit enter and written settings to flash. Every time I re-open the software it says I’m in position mode, but it’s behaving like it’s in rate mode. Also in the MODE 1 and MODE 2 boxes, the MODE 1 box is always darkened after I hook the gimbal up to the software, which makes me think that it’s stuck in rate mode. Anyone having a similar issue or know how to get the MODE 2 box selected? I’m running a Phantom with stock transmitter so can’t use a button to switch it over
Thanks!
Have you installed all wires like i posted in this blog?
Yes I have, it was working fine for the first 2 days then it suddenly started acting strangely – I didn’t even hook it up to a computer. It worked fine, I put it in it’s box, and the next time I got it out its started acting strange, and has been ever since….
No Naza Firmware Update? Did you check with a different potentiometer? May that one is faulty? Are specs correct on the potentiometer? I think i have posted them earlier in this post.
Out of interest, if I removed the cable going from C to F1 would that mean only rate mode works? If you think so I can check that cable is not loose, but would rather get your opinion before I pull it all apart!
Thanks for your help!
No NAZA firmware update. Yes the pot is correct, have used the recommended specs. It’s strange as when I check the X1 in NAZA or tilt readings in Tarot software, it shows the number stop as I stop turning the knob, so it seems that the knob is fine and the software is understanding that it’s stopped, yet the gimbal keeps turning
Well, i think you can loose one cable with Tarot firmware 1.3 and higher but don’t ask me which one. I would need to search it on the web too ^^ I just left my setup like it was with 1.1 and it still works great with 1.4 😉
Haha, OK will do some cutting and snipping and see what happens, will report back on here if I find any success! Thanks for the blog – very helpful
Hi,
My Tarot works perfectly, thanks to you and a little pitch control thingy I bought from maikelsdesign at shapeways.com.
The question of the power pins to the GoPro came up a few times before on this thread. My question is about powering the Hero3 Black directly from the Tarot board. Some forums say not to do it, because the charging camera draws too much current for the board to handle, up to 1A. I would like to hear your opinion on this.
What if the battery is already charged?
Thanks
I do power the GoPro directly from the Tarot board.
By doing so the board sometimes gets very hot. So if the gimbal is powered up with a attached GoPro on the ground it can get so hot that the gimbal won’t initiate if you change then batteries.
I fix this by unpowering it and blowing 2-3 on the Tarot board which helps cooling it down so far that it will restart again when you attach a batterie. Up in the air there is enough blow to keep it cool enough.
So I got a small problem, but as I don’t have to swap GoPro batteries this is not a real big problem for me.
The question is if the heat will damage the board over time. I use it in this setup for 4 month now and it still works.
But as always, its up to you to decide if you want to do it or not.
Hi Mathias. Not sure if you want to add this note to your original instructions at the top or not :).
I’ve solved my problem having the gimbal stuck in rate mode.
If your running software version 1.3 or above, you may well need to remove the C to F1 wire. After upgrading it seemed that no matter what setting I tried in Tarot software or Naza software, the tilt would work in Rate mode.
After removing the F1 wire described above from Naza the gimbal can now be used in EITHER rate or positional mode.
Hello Jeremey
Thats interesting because i’m running 1.4 with the excact setup as mentioned in my blog, but i’ll added a note with your tip in nthe instructions, in case someone else gots this problem.
In my case it works with the C/F1 wire attached.
Thank you for your input !
That is very strange. It was working fine in 1.3. Then by itself overnight it only worked in Rate mode on 1.3. Removed the cable and it immediately worked in position mode on 1.3. Upgraded to 1.4 and same deal – positional mode would only work with that cable removed. I’ve heard 1 or 2 others online with the same problem – odd that it’s random!
Ok , can you help me understand how you hook up the wire’s f2and f2- from the gimbal to NAZA. Do I tape them ? Or cur my servos ?
Take servo cables or crimp some cables so you can plug them in.
Taping won’t do.
Thanks I understand . Now , wow I’ve learned so much on this blog . Kids should be reading this .
Well I finally go the Tarot operational with the stock TX that came with the Phantom.
I have T on Tarot card connected to top F2 in phantom and negative to negative.
Did not hook up C. I have the Tarot set on Position, not Rate.
Up until now, the camera would only look up and level at horizon; not down. I was really stuck!
Finally I discovered you have to calibrate X1 in the Naza software. That did the trick! YEESSSS!!
I have Tarot tilt parameters at +1 and -100 degrees so the camera limits at horizon but can look all the way down.
Can’t wait to try it out
I am using a MaikelsDesign lever on back of the TX. Works pretty well for $7.00
Much needed Blog Mathias, thanks. I just got the late Phantom with a Tilt lever on the back of TX. It turns a tiny potentiometer less than a quarter turn on the circuit board. I followed your instructions and was able to power Tarot using Phantom Aux cables and used two cables for naza-tarotboard as this Phantom is new but no response from tilt. Do I have to replace the original lever with a potentiometer that has a knob? Does someone uses this new Phantom lever for Tarot?
Should work with the tilt Lever as the potentiometer is solidered to the same source.
Did you calibrate the Lever inside of Naza yet?
I was able to get Tarot to move using the lever in the control but it went all the way up and I was not able to make camera to look down even if I turned lever back to where it was.
Please help!
Followed David calibration and and was able to move Tarot tilt all the way down and then vack to horizontal but camera starts to bounce up and down. Question is: Where is the Position, not rate button? Is it in Naza? I have no Tarot software. Is it there?
Get the software from the Tarot site.
http://tarot-rc-heli.com/Tarot-RC-Software
Its also a good idea to upgrade the board and motor firmware.
Read the notes in the download package on how to do a correct update.
Be aware, the drivers for the usb to serial adapter are not win8 compatible. At least not the last time i used them.
Ok, so in Tarot software I will find the “Position” option, wright?
My new PC has Windows 8, that´s why I cannot install Tarot software, oh well…
I use a piece of wood on the back of camera and a zip tie to make it “look” down as Tarot puts camera facing horizon.
Will look for a PC with old Windows so I can program Tarot to “Position” mode. As it is now it sucks: camera bounces like crazy when moving up.
Thanks!
Can someone tell me where is the “Rate Mode” and “Position Mode” option?
I want to make lever to move camera and stay with lever, not keep moving.
I was not able to find “Rate mode” or “Position mode” option in neither Tarot software and NAZA software… I am almost there!
Ok, seems like in Tarot software MODE 2 is actually what you call “position mode” and MODE 1 is “Rate mode”.
Hi everybody , I have a ? for those who used the adaptor boards . Do you have too provide your own screws too mount the post for the gimbal ?
Regarding the motor “bounce back” effect; I found that you really have to be patient and play around with the PID settings. Here’s link to PDF: http://www.chiefaircraft.com/pdf/TarotManual.pdf.
After loading up the camera with a Simensays housing and a ND filter plus additional wiring for an FPV; the Tilt motor would start bucking when I had it faced down towards the ground at close to limit position of 110 degrees. The solution was to go into the Motor configuration window and ramp up the Tilt power from 35 to 50%
That did the trick.
Merry Christmas everyone!!
Great info here! Thank you! Do you know if the T-2D works with the GoPro 3+ also?
I have not tested it my self. But as the GoPro 3+ has the identical size and weight this should not be a Problem at all.
The difference in weight of the 3+ only Comes from the lighter water proof housing, which you don’t Need for the gimbal anyway.
Hi Mathias, I been searching for help since so so long. I didn’t find and what ever found didn’t help me. so I was going to see if you are familiar with this problem. sadly since I bought it I haven’t been able to make it work which is since November 🙁
Here I have the link to my video. Would be great if there is some solution to it.
Thank you in advance.
https://www.dropbox.com/s/zt438zvjnh8v27y/20140106_203253.mp4
Hello Anup
Normaly you don’t have to change values as they are pretty well preset for the GoPro.
My guess is the Motor cables are not corrected connected to the board. This way the wrong Motor turns when the board tries to Level the cam.
Check the Connections with the original supplied diagram.
Hi Mathias, I got the same problem of Anup since i upgrade the firmware to 1.4. The gimbal get crazy. Any help?
Did it work before 1.4?
Did you update both, board and motor firmware with the latest revision?
If so, try to redownload and reinstall the latest firmware.
Mathias,
I fix it!! Have to calibrate sensors correctly. The thing is that I don’t know how to do it. Have to put the gimbal sensor on a flat surface(connected to the software with the motor off) and then click calibrate sensors button, and that’s it. Here a video that found that show how to do it: http://www.youtube.com/watch?v=e0PU0osCE4o
The only thing is that i can’t set up the pitch control. I have a DJI Phantom, put the white cable from “P”of the gimbal board and the black cable from (-) from the gimbal board to the F2 of my phantom receiver or white and red NAZA box with the white cable down and the black up. I turn on the gimbal settings in the naza software and nothing. I install the pitch lever in the F2 control in the remote control, nothing happen. Any idea or missing
Thank you for the link to the calibration process.
As for the pitch lever. Did you already calibrate it inside the Naza software?
Just activating the gimbal setting will not work.
Mathias, thanks for quick answer! I put your parameters, the only doubt is the frequency. In your photo you have 400hz. Its that correct? What else i have to do?
I use the parameters in the pictures.
You will also need to calibrate the pitch nob, lever, potentiometer or how ever you want to call it.
Do this in the menu where you calibrate the other buttons and sticks too. If the hardware is not calibrated it will not be recognized and not work.
But its all set. I don’t understand whats wrong? There’s no pitch lever calibration or setting. Not working.
Go to Nazam menu “Basic” choose “RC” and calibrate.
For the gimbal control you only need to calibrate the stuff on the right side.
Press “Calibration Start” and move your pitch Lever cempletty from one side to the other untill it stops. You should now see the values changing. Also flip the other levers so they get calibrated.
When done press “Calibration Finished”
Its also smart to calibrate the other sticks from time to time. After a Firmware update you are also forced to do that again 😉
In the tab RC of the BASIC menu doesn’t appear the pitch lever calibration, i only have the Command Stick Calibration and X1 calibration. See the snapshot in this link: http://elcuervofilms.com/Images/naza.jpg
I saw in a calibration tutorial that the pitch control is X1, but when i tried to calibrate doesn’t move when i hit the lever.
If so either the cables are wrong connected; you didn’t solder your pitch potentiometer correctly or it doesn’t meet the specs.
Be aware that you might nit need 3 cables with 1.4.
Read the yellow text far up.
Now i’m in trouble. Trying to make the X1 nob work, i upgraded the RC with a firmware of the phantom 2 RC. Now the RC doesn’t work, when i do the power cycle the RC led turn green and then red with one second beep and then turn off. Neither Phantom and software assistant see it or connect it. Any idea.
You updated the remote?
There was never a tx update for the Phantom v1. At leasst as I know of.
There is some software and driver for the v1.1 and v1.3 remote. If you got that one you might be able to fix it again.
http://www.dji.com/download/dt7-dr16-rc-system-downloads/
But I never came across such a problem. So its up to you.
If that doesn’t work you might want to as around in one of the DJI user Facebook groups.
https://www.facebook.com/groups/DJIGuys/
Or ask at the official site, which could take a few days
https://www.facebook.com/DJIglobal
I Installed the Phantom 2 RC firmware with the Phantom 2 RC Assistant, darm it.
Thanks for the link, i downloaded the correct phantom rc assistant it not working cause didn’t connect, but when turn it into loader mode(i learned that with the wrong assistant) the RC connect but says that firmware is 0.0.0.0 , no updates and Loader:12.0.0.2 Thats it, no control, nothing. Any other idea.
And the assistant when i connect it in “loader mode” don’t let me upgrade or degrade the rc, maybe because i installed a higher o different firmware. I really dont know.
Thank you Matias and Fran, I saw this video long ago and this didn’t work for me.
I also did the cable check several time and I am sure it is correctly inserted.
I am giving up on this one 🙁 Now i have no gopro3 to try it on so I am going to have to wait for another 2 weeks until i have new go pro.
What else could have gone wrong? motor? the board?
Is it really time to take it to gimbal gig repairing center?
Thank you for taking your time.
Best for now
Hello, thank you for your article.
I have a little question, like seen in your video when you stops the pot the gimbal also stops
When I move my pot meter 10° de gimbal goes up or down but didn’t stop. I need to put the pot meter again on 0.
How and where can i change it? it was also the same with the default pot meter.
Thanks and best regards
Read the blog post. Its all in there about rate and position mode 😉
Dear Mathias, thanks a lot for your article!
I’d like to know how you distribute the power for your FPV Sender, Gimbal & GoPro.
You mentioned using the power cable in the leg of the Phantom. So your set-up is Power Cable -> Gimbal Board -> GoPro. Where is the FPV sender getting his power from? I am thinking about getting one as well..
Best regards
I made a Y adapter. If that makes sense. I soldered two cables with plugs to the spare power cable. So I can unplug the gimbal or fpv sender (atached with velcro) if i want to.
The GoPro gets power from the Tarot gimbal. This makes some problems from time to time as the Tarot board gets hot when supplying power to the GoPro and it doesn’t get cooled by air.
So sometimes when I change the LiPo the gimbal won’t start due of this. Detaching the LiPo and short blow on the board always cooled it down enough for me yet.
The other option would be to get the power from the fpv sender. Something I will test in the near future. But it really depends on the sender. Just make sure there’s not to much power or your GoPro could suffer.
Maybe install a fuse if you want to be on the safe side.
Cool thanks, that makes sense. Kind of funny, I’ve ben searching for hours on english forums and all the good info is here on a swiss blog (I’m swiss, too) 🙂
Hello. I’ve searched this forum and can’t seem to find a definitive answer, however, I’ve seen different wiring configurations for tilt control on the phantom some with 3 wires and others with 2 after the tarot 1.4 upgrade. I have wired it both ways but now have T wired to bottom F2 and (-) wired to top F2. I have the gimbal turned on in the Naza software however the pitch control lever in the back of the stock TX is unresponsive despite appearing to be properly seated. Nothing in my Naza software seems to confirm that the lever is even installed. What am I doing wrong?
Hello Nathan
Just follow my blog and you shoud succed.
My wild guess is you did not calibrate the pitch lever yet inside of the Naza Control.
I input all of your values under the gimbal tab and working the lever doesn’t appear to have any affect on the gimbal. I’ve seen lots of posts of pots and soldering inside the TX but wasn’t the lever (essentially a screwdriver) supposed to eliminate all of that?
If the lever does not have any inpact then you need to CALIBRATE it…
Like this?
http://elcuervofilms.com/Images/naza.jpg
Yes. Press start on the x1/x2 side and move your pitch lever compketky from one to the other side. You must see the bar moving. When completly moved from one side to the other press finish.
Great blog and thanks for the wealth of knowledge here. I just got the Tarot V2 and Phantom 1. I am using the Tarot XYZ software to see the board when USB is connected to the Gimbal Control Connector (and able to see orientation – the animation correlates with gimbal position), but it does NOT see the motor when USB is connected to the Motor Driver Connector for Motor Calibration. I think there is no voltage going to the motor. But the motor is able to relay the coordinates back to the software. Does this mean I have a bad board? ( I am using the 3cell lipo for power – and I am very careful and never mixed up +- polarity and there is only one Com Port to connect – but it does not)
With your settings I’m only able to get a range from center to far right on my x1 calibration. In addition my gimbal will only look forward or pitch up. Any ideas?
By the way, I have found several threads regarding x1 pots that are crushed when the transmitter housing is closed, which reduces contact with the lever arm. I’m afraid to keep prying it from the board or pushing it with a screwdriver (found on YouTube). Any solution for that, while I’ve got you?
I also only got a 90 degrees range on my potti. Up is straight forward and 90 dregress to the right = straight down.
Did you calibrate your x1 in the Naza Assist?
Did you change any settings in the Tarot Config Software? There you can set limits on ho^w far the gimbal is allowed to turn.
The gyro gives feedback back to the board not the motors.
Are you sure your motors are plugged in the correct plug? Many seem to do this wrong.
[…] http://www.riot.ch/tarot-t-2d-gimbal…a-dji-phantom/ […]
Hi,
Thnx for the instructions, works perfect.
Only i go now from 10 min flight time to 4 min, is this normal that the gimbal is using so much power?
thnx
It really depends on what size battery you use and how you set the voltage protection. If you use a stock battery then this seens about right. The gimbal needs power, the added weight needs thrust and if you charge the GoPro too then this needs even more power.
I use 2800mAh 3S LiPo’s and fly them down to 3.6/3.7V controlled by a added LiPo warner. This gives me +\- 6 Minutes (inc. fpv sender).
I have but one question. I am seeing in several internet posts that show the servo cable going to the receiver. Yours says plug to the Flight Controller. What makes the difference? I am very frustrated with roughly 6 hours banging my head against the wall. I have a Naza M V2, Spektrum AR9020, Tarot T-2d. Please reply.
Hello Gorden
It really depends on what you want to do.
Some connect it to the receiver, some use it trough the Naza Controller.
I never have set it up trough the Receiver yet. So sorry I can’t help you with that.
But If this what you are looking for, then there are lots of usefull sources on the internet for sure.
I followed the instructions and the gimball moved a little, like 10 degrees. lately it stopped moving and I don’t have any idea of what’s happening. Can you help me?
Thanx for the repy,
problem is solved, i change the power from the fpv transmitter with the gimbal, and now i have a flight time of 8 min.
Wierd, but hey, im happy:)
I am using tarot for a month and everything works great. Yestarday the tarot are crazy. I did the calibrate sensors more than 100 times. When i pull the t-2d to go down its going and be crazy again.
I really need help. Whats going on?
After everything installed and configured, the control does not move the Phantom gimbal. What am I doing wrong?
PS. Have I enabled the gimbal by Assistant NAZA end calibration x1.
If the bars in the Naza don’^t move you’ve done the calibration wrong. If they move but the gimbal doens’t, then check the wiring.
Contact Tarot if it was working before.
Check all wiring and settings again. Also connect the gimbal to the Computer so you can check in the Tarot configuartion Software if there is a Limit set. Maybe do a Gimbals Firmware and motor driver update.
During calibration values move correctly.
Everything is updated correctly.
Setting the wrong gimbal can cause this?
i want to power the tarot gimbal from my gopro. i have the video/charger cable but dont know which set of pins to plug into… ctr, s+-, or p+-. could you please help out!
Yesterday checked everything again and saw that he had plugged the wrong cables. I watched a video that taught me wrong.
Thanks for the help and photos.
Please, If you are going to write technical material, pass a study course in spelling, punctuation, and grammar.
It will make you a lot more credible to your readers.
Sorry that I’m not capable of writting any perfect english. But If you are willing to learn German or even better Swiss German (my native language), then I will be able to send you some replies with correct gramatics.
Most people are just happy that they get some information or help which they are looking out for. But it seems for you grammar is more important then content.
But you can proofreading my stuff anytime and send me the corrected content 😉
That could be easily done, as I am a retired technical writer.
Maybe we could form a team.
Peace
Hello, I just buy a tarot T2-D V2 to use on my phantom 2 and I am very satisfied with the product, I use a knob to set the tilt of the camera but when I switch to Stick Position Mode in Attitude monitor mode appears only – 45 degrees is my limit this minimum angle set to -90 degrees, I wonder why this limitation so happens that in this mode, when I change the angle of the camera to approximately -30 and lean the aircraft camera moves not keeping the previous angle -30 degrees, can you help me?
It’s really a nice and useful piece of info. I’m satisfied that
you just shared this useful information with us. Please keep us informed like this.
Thank you for sharing.
Very neat article post. Much thanks again. Much obliged.
Enjoyed examining this, very good stuff, thankyou. Talk sense to a fool and he calls you foolish.
[…] […]
Great information!
Thank you for sharing, after reading it I was able to understand how to properly setup my gimbal.
How should I connect the gimbal to the power supply? I would prefer a temporary and/or removable connection, rather than soldering the power supply wires to my Phantom 1.
My partner and I stumbled over here coming from a different page and thought I may as well
check things out. I like what I see so now i am
following you. Look forward to looking at your web page for a second time.
Awesome blog. Very helpful in setting up my Tarot!